English
如今,无论是在生活中还是网络上,AI人工智能无疑是当之无愧的热词。在教育领域当中,“人工智能+教育”也成为了非常热门的话题。
人工智能的技术核心部分——机器人工程(Robotics Engineering),早已走入海淀凯文的课堂,走进海淀凯文学子的日常学习生活。通过组装、搭建、调试程序、运行机器人,海淀凯文学子在机器人工程课中提高创新能力,进一步激发学习兴趣。
海淀凯文学子调试运行机器人走迷宫
近期,海淀凯文高中机器人工程课的学生用一周的时间,完成了一个有趣味的项目:自动寻路程序(Automatic pathway finding program)。

同学们在课堂上学习了红外线传感器的使用后,任课老师就布置了这个任务。海淀凯文学子需要考虑自己的程序想要完成一个什么样的迷宫、自主搭建迷宫、自主设计程序;在完成简单的迷宫后,也可以增加迷宫的复杂程度。随着迷宫越来越复杂,程序也会变得越来越完善。
海淀凯文学子以小组为单位来进行这个项目。一开始大家都是一头雾水:一个红外线传感器而已,和走迷宫有什么关系?很快,同学们就发现可以使用红外线传感器探测到的距离参数,来发现前方是否有障碍物,这样一来,就是同学们发挥创造力的时候了!

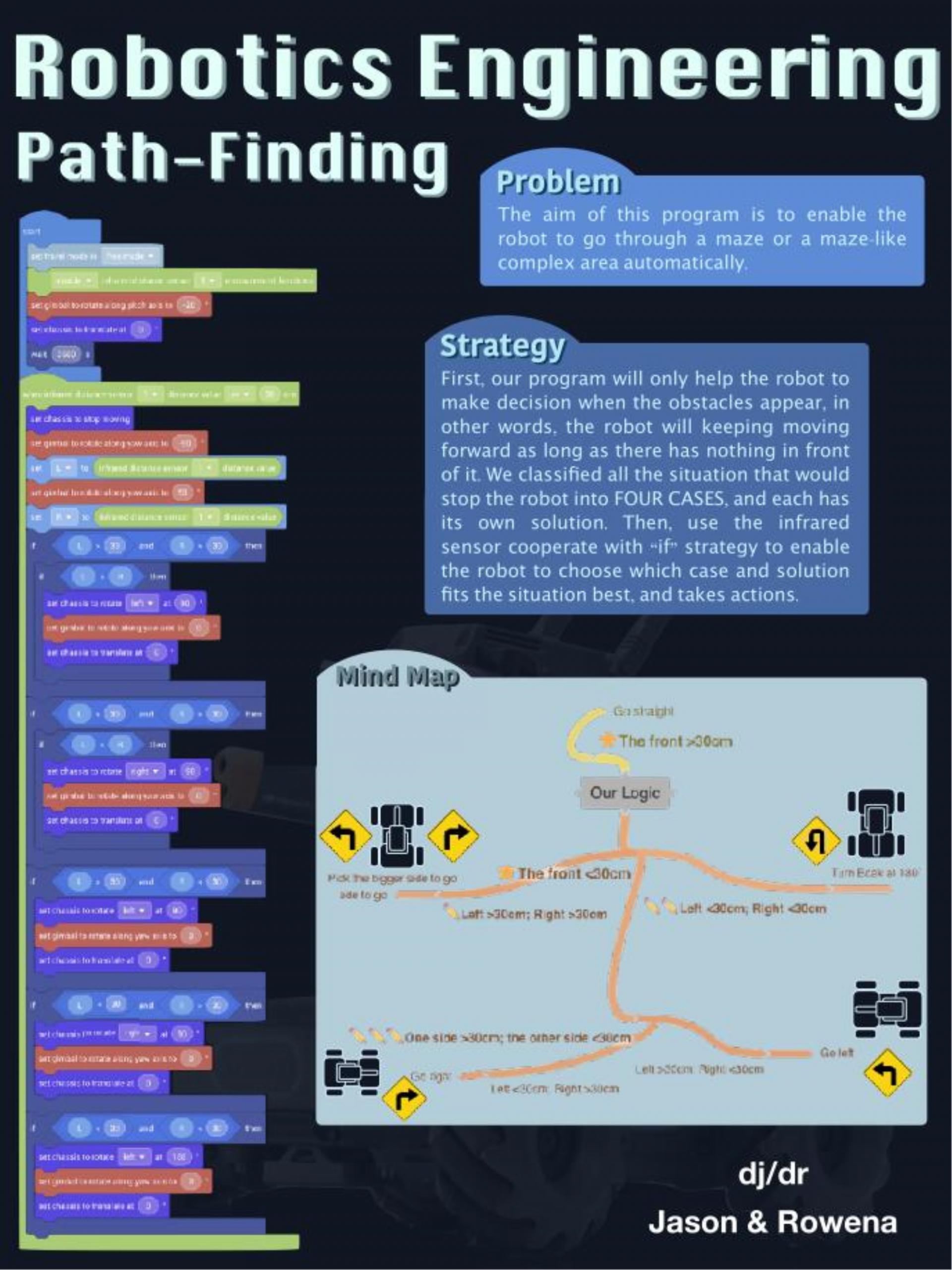
有的小组立刻意识到,遇到障碍物就让机器人向左转,是最简单快速的方法。有的小组试图每次遇到障碍,就让机器人的“头部”(云台)左右各探测一次,找到左右哪里更合适,就往哪里走。有的就会犯了“强迫症”,一定要机器人先原地转一圈,找到最优路径后才继续前进……同样的目标,遇到了不同的有趣的头脑,却成就了截然不同的程序。

“在这个项目中,我只是给了一个大方向,至于你如何去达成这个目标,我完全不会干涉,学生可以尽情的选择自己合适的方式。通过自己的思考来提出方案,通过自己的实践来解决问题,这样会锻炼到同学们的创新能力和问题解决能力,”授课老师Raphael Gao说,“在做项目的过程中,同学们自主探索,自主学习新的知识,这是最理想的学习模式。每位同学在工程课上都很清楚自己的表现,做的好或不好都不需要老师评价,反馈是很直接的。”
因此,授课老师Raphael Gao觉得自己的角色更像是顾问,鼓励学生去探索新知识的方向,而不是简单地告诉学生“你应该这样做”。

“由于每组同学可以选择自己去设计怎样的迷宫和程序 ,这门课程就能兼顾分层次教学,无论学生能力水平是怎样,都能对某个知识点不断熟悉。我对学生做项目的结果很满意,也很吃惊,同学们做出了很多有特色的程序,并证明其可行。”
PPT、课堂展示、视频拍摄……在拥有基础知识的前提下,海淀凯文学子不断去尝试,去解决问题。即使在项目刚布置下来时,他们有小小的疑惑,也在项目推行的过程中,出色地解决了问题。“如果给学生一个新的项目,他们一定会知道自己该怎么做,一步步去解决。”
在视频中,机器人在迷宫中自由穿梭,它是如何识别方向的呢?机器人内置红外距离传感器,可以通过这个传感器来感知与外界物体的距离。海淀凯文学子在课堂展示中这样解释:
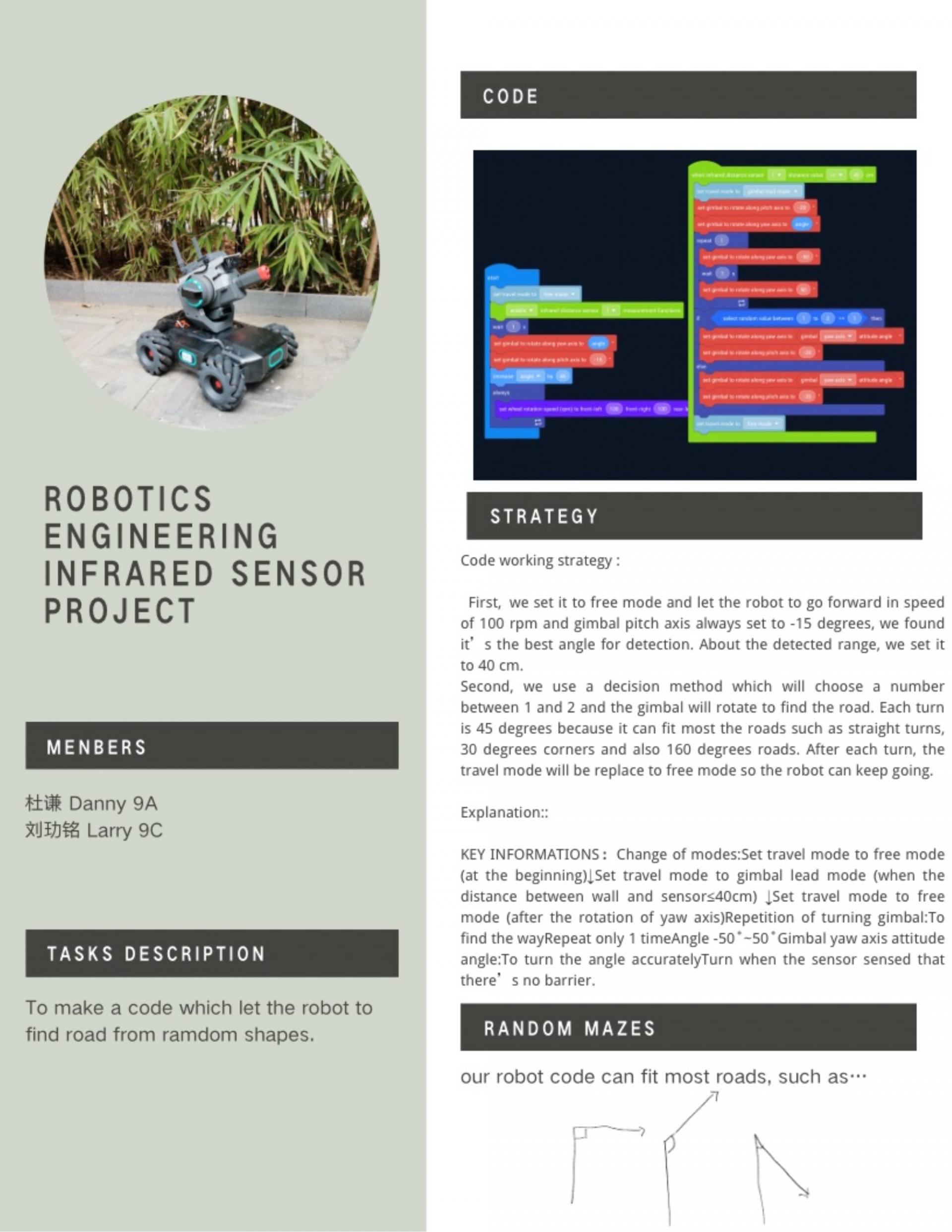
“Every time the infrared distance sensor test a distance <=40cm, we will set the robot to turn 90° to the left.”(每次当红外线传感器探测到小于等于40厘米的距离,我们就让机器人向左转90度。)
同学们在其中也遇到过困难,比如两个代码重叠等。面对挑战,他们进行总结与反思:
"We want the robot to test the obstacles, in order to do that, we did several tests in the first class. Finally we find out the best angle for the pitch & yaw axis, with this angle, the robot can always find the correct obstacle. "(我们想让机器人能够检测障碍物,所以在第一节课我们做了很多测试来找到最合适的航向轴和俯仰轴的角度,之后使用这个角度我们的机器人就可以准确的识别到障碍物了。)
“This is a long and interesting project. We did some parts quite easily, and we met some difficulties. You need to pay attention to details. For example, if your gimbal turns too fast, the robot will not have time to get the correct angle value. If you have multiple if statement, you need to think about which if you need to put at first. And the easiest part for us is the turning function. We decide to use free mode at beginning, so we just need to let the chassis turn to the correct direction and don’t need to think about the gimbal.“(这是一个漫长而有趣的项目。有地方我们觉得简单,也有地方我们遇到了困难。比如如果你云台转的太快了,就可能错过正确的数据。如果你用了很多个如果模块,那就就要认真思考哪个如果应该放在第一位。我们觉得最简单的部分是转向的部分。因为我们一开始就设置机器人使用自由模式,那就不需要考虑云台,直接转动底盘就可以了。)
授课老师Raphael Gao在完成项目的总结课上带领学生一起回顾的时候问同学们:“大家现在回想一下,在这个过程中你学到了什么?再想一下,你是如何学到的?”

“大家有没有发现,在这个项目中,我其实并没有帮助你,也没有教授你知识,但是你却有所收获。这是你通过你的思考,你的努力学到的。你记录了犯下的错误,思考了解决的方案,改正了你的程序,这个过程,就是我们最想让大家学习到的能力:解决问题的能力。知识总有不够用的时候,将来也一定会需要新的困难,但是大家只要能够掌握解决问题的能力,我相信将来即便遇到困难,也会迎刃而解。”
主动探索是一种有趣的学习方式,海淀凯文的机器人工程课让学生进入无限想象和创造的空间,共同分享快乐时光,提高塑造未来的能力,培养多项技能,让每一名同学都用主动的状态去接受未知的开始,成为21世纪优秀人才。
